A base to glue the main parts on. The base should be around 30cm in length and 10cm in width. The ideal base material is wood, and is what we used when making the bionic finger.

This is to supply the electricity to the finger. The battery holder should have a special input key attached that is able to connect into the NanoBoard Port. Instead of using batteries, it is possible to connect devices with a USB port to the Nanoboard using a cable, this provides enough electricity to the board. This is also how you download the code onto the board.

Connected to the glove, this is what sends your finger movements to the NanoBoard. We used a sensor by 'Spectra Symbol' although it is possible to use ones from other companies. Make sure the sensor has wires attached that enable it to be connected to the NanoBoard

The glove can be made of any material, though it is easiest to use a basic plastic glove. Make sure the glove fits the user. The glove is the connection layer between the 'FlexSensor' and the Hand.

The Servo is a small device that has a motor and a fan-like top. Connected to the NanoBoard and string, it receives signals from the NanoBoard and the top spins which loosens and tightens the string. We used a 'Tower Pro Micro Servo', although it is possible to use other servos of similar designs.

The hot glue gun uses the glue to to stick all the parts together.

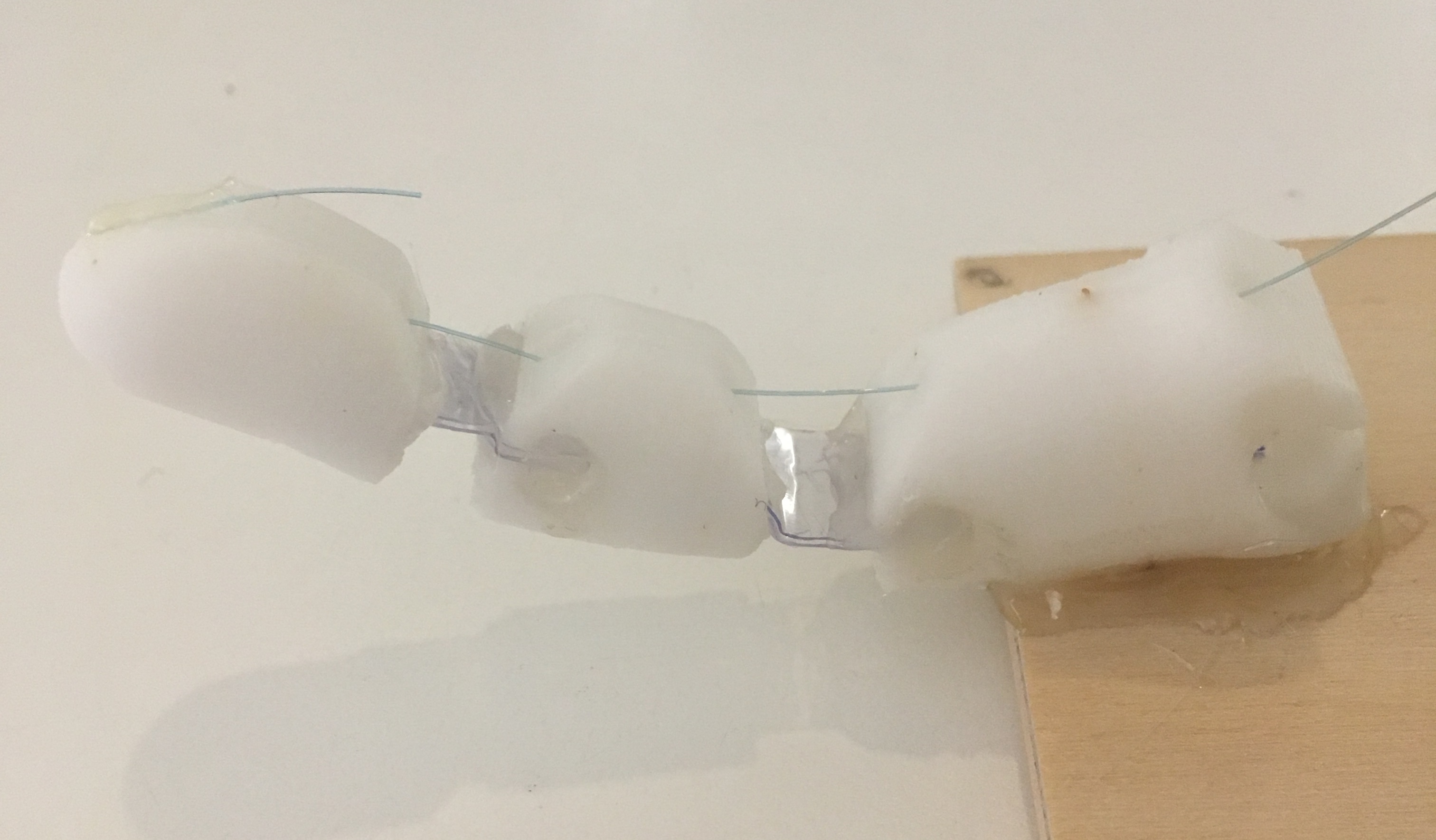
The thin plastic sheet is used to keep the finger parts together. The plastic can be replaced with any material that has similar features and functions (flexible but will revert to original position).
The string is connected to the servo and is threaded through the finger parts, it enables the finger to close and open up when the string loosens or tightens. We used clear fishing line when making our bionic finger, although any durable string that doesn't change shape or stretch over time could be used.

The 3 finger parts are connected together using a plastic sheet and glue. The finger moving is the final product of all the materials together.
We have connected an 'Arduino Nano' and an 'Arduino Nano Shield'. The NanoBoard has the code which has been downloaded through the Arduino software from a laptop. The board connects the FlexSensor and the Servo, and converts electrical inputs from one device to another. It is possible to use other 'Arduino Boards' as long as they have the same function.
